Tilting Trains and Technological Dead-Ends
The history of tilting trains is on my mind, because it’s easy to take a technological advance and declare it a solution to a problem without first producing it at scale. I know that 10 years ago I was a big fan of tilting trains in comments and early posts, based on both academic literature on the subject and existing practices. Unfortunately, this turned into a technological dead-end because the maintenance costs were too high, disproportionate to the real speed benefits, and further work has gone in different directions. I bring this up because it’s a good example of how even a solution that has been proven to work at scale can turn out to be a dead-end.
What is tilting?
It is a way of getting trains to run at higher cant deficiency.
What is cant deficiency?
Okay. Let’s derive this from physical first principles.
The lateral acceleration on a train going on a curve is given by the formula a = v^2/r. For example, if the speed is 180 km/h, which is 50 m/s, and the curve radius is 2,000 meters, then the acceleration is 50^2/2000 = 1.25 m/s^2.
Now, on pretty much any curve, a road or railway will be banked, with the outer side elevated above the inner side. On a railway this is not called banking, but rather superelevation or cant. That way, gravity countermands some of the centrifugal force felt by the train. The formula on standard-gauge track is that 150 mm of cant equal 1 m/s^2 of lateral acceleration. The cant is free speed – if the train is perfectly canted then there is no centrifugal force felt by the passengers or the train systems, and the balance between the force on the inner and outer rail is perfect, as if there is no curve at all.
The maximum superelevation on a railway is 200 mm, but it only exists on some Shinkansen lines. More typical of high-speed rail is 160-180 mm, and on conventional rail the range is more like 130-160; moreover, if trains are expected to run at low speed, for example if the line is dominated by slow freight traffic or sometimes even if the railroad just hasn’t bothered increasing the speed limit, cant will be even lower, down to 50-80 mm on many American examples. Therefore, on passenger trains, it is always desirable to run faster, that is to combine the cant with some lateral acceleration felt by the passengers. Wikipedia has a force diagram:
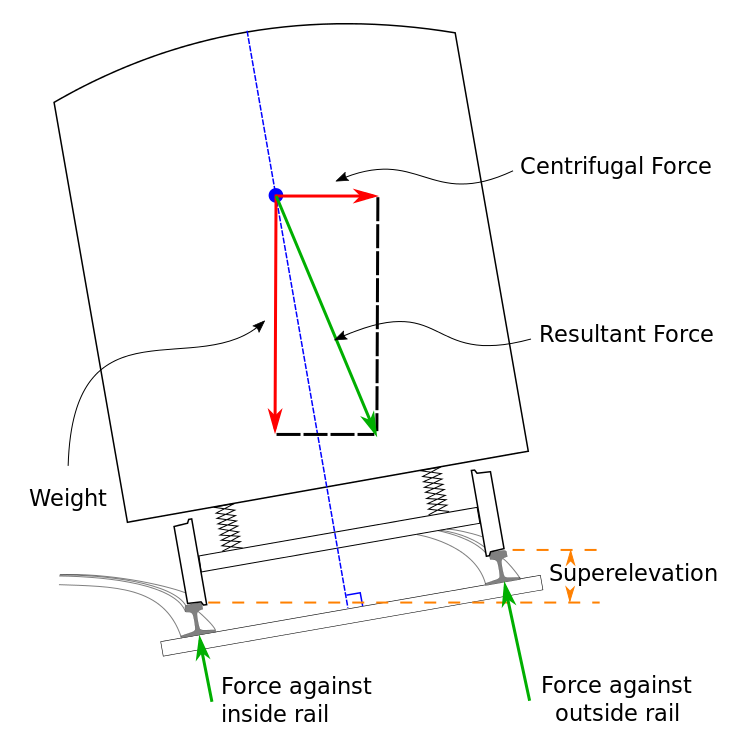
The resultant force, the downward-pointing green arrow, doesn’t point directly toward the train floor, because the train goes faster than the balance speed. This is fine – some lateral acceleration is acceptable. This can be expressed in units of acceleration, that is v^2/r with the contribution of cant netted out, but in regulations it’s instead expressed in theoretical additional superelevation required to balance, that is in mm (or inches, in the US). This is called cant deficiency, unbalanced superelevation, or underbalance, and follows the same 150 mm = 1 m/s^2 formula on standard-gauge track.
Note also that it is possible to have cant excess, that is negative cant deficiency. This occurs when the cant chosen for a curve is a compromise between faster and slower trains, and the slower trains are so much slower the direction of the net force is toward the inner rail and not the outer rail. This is a common occurrence when passenger and freight trains share a line owned by a passenger rail-centric authority (a freight rail-centric one will just set the cant for freight balance). It can also occur when local and express passenger trains share a line – there are some canted curves at stations in southeastern Connecticut on the Northeast Corridor.
The maximum cant deficiency is ordinarily in the 130-160 mm range, depending on the national regulations. So ordinarily, you add up the maximum cant and cant deficiency and get a lateral acceleration of about 2 m/s^2, which is what I base all of my regional rail timetables on.
You may also note that the net force vector is not just of different direction from the vertical relative to the carbody but also of slightly greater magnitude. This is an issue I cited as a problem for Hyperloop, which intends to use far higher cant than a regular train, but at the scale of a regular train, it is not relevant. The magnitude of a vector consisting of a 9.8 m/s^2 weight force and a 2 m/s^2 centrifugal force is 10 m/s^2.
Okay, so how does tilt interact with this?
To understand tilt, first we need to understand the issue of suspension.
A good example of suspension in action is American regulations on cant deficiency. As of the early 2010s, the FRA regulations depend on train testing, but are in practice, 6″, or about 150 mm. But previously the blanket rule was 3″, with 4-5″ allowed only by exception, mocked by 2000s-era advocates as “the magic high-speed rail waiver.” This is a matter of carbody suspension, which can be readily seen in the force diagram in the above secetion, in which the train rests on springs.
The issue with suspension is that, because the carbody is sprung, it is subject to centrifugal force, and will naturally suspend to the outside of the curve. In the following diagram, the train is moving away from the viewer and turning left, so the inside rail is on the left and the the outside rail is on the right:

The cant is 150 mm, and the cant deficiency is held to be 150 mm as well, but the carbody sways a few degrees (about 3) to the outside of the curve, which adds to the perceived lateral acceleration, increasing it from 1 m/s^2 to about 1.5. This is typical of a modern passenger train; the old FRA regulations on the matter were based on an experiment from the 1950s using New Haven Railroad trains with unusually soft suspension, tilting so far to the outside of the curve that even 3″ cant deficiency was enough to produce about 1.5 m/s^2 of lateral force felt by the passengers.
By the same token, a train with theoretically perfectly rigid suspension could have 225 mm of cant deficiency and satisfy regulators, but such a train doesn’t quite exist.
Here comes tilt. Tilt is a mechanism that shifts the springs so that the carbody leans not to the outside of the curve but to its inside. The Pendolino technology is theoretically capable of 300 mm of cant deficiency, and practically of 270. This does not mean passengers feel 1.8-2 m/s^2 of lateral acceleration; the train’s bogies feel that, but are designed to be capable of running safely, while the passengers feel far less. In fact the Pendolino had to limit the tilt just to make sure passengers would feel some lateral acceleration, because it was capable of reducing the carbody centrifugal force to zero and this led to motion sickness as passengers saw the horizon rise and fall without any centrifugal force giving motion cues.
Two lower cant deficiency-technology than Pendolino-style tilt are notable, as those are not technological dead-ends, and in fact remain in production. Those are the Talgo and the Shinkansen active suspension. The Talgo has no axles, and incorporates a gravity-based pendular system in which the train is sprung not from the bottom up but from the top down; this still isn’t enough to permit 225 mm of cant deficiency, but high-speed versions like the AVRIL permit 180, which is respectable. The Shinkansen active suspension is computer-controlled, like the Pendolino, but only tilts 2 degrees, allowing up to 180 mm of cant deficiency.
What is the use case of tilting, then?
Well, the speed is higher. How much higher the speed is depends on the underlying cant. The active tilt systems developed for the Pendolino, the Advanced Passenger Train, and ICE T are fundamentally designed for mixed-traffic lines. On those lines, there is no chance of superelevating the curves 200 mm – one freight locomotive at cant excess would demolish the inner track, and the freight loads would shift unacceptably toward the inner rail. A more realistic cant if there is much slow freight traffic is 80 mm, in which case the difference between 150 and 300 mm of cant deficiency corresponds to a speed ratio of 
Note that the square root in the formula, coming from the fact that acceleration formula contains a square of the speed, means that the higher the cant, the less we care about cant deficiency. Moreover, at very high speed, 300 mm of cant deficiency, already problematic at medium speed (the Pendolino had to be derated to 270), is unstable when there is significant wind. Martin Lindahl’s thesis, the first link in the introduction, runs computer simulations at 350 km/h and finds that, with safety margins incorporated, the maximum feasible cant deficiency is 250 mm. On dedicated high-speed track, the speed ratio is then 
The result is that for very high-speed rail applications, Pendolino-level tilting was never developed. The maximum cant deficiency on a production train capable of running at 300 km/h or faster is 9″ (230 mm) on the Avelia Liberty, a bespoke train that cost about double per car what 300 km/h trains cost in Europe. To speed up legacy Shinkansen lines, JR Central and JR East have developed active suspension, stretching the 2.5 km curves of the Tokaido Shinkansen from the 1950s and 60s to allow 285 km/h with the latest N700 trains, and allowing 360 km/h on the 4 km curves of the Tohoku Shinkansen.
What happened to the Pendolino?
The Pendolino and similar trains, such as the ICE T, have faced high maintenance costs. Active tilting taxes the train’s mechanics, and it’s inherently a compromise between maintenance costs and cant deficiency – this is why the Pendolino runs at 270 mm where it was originally capable of 300 mm. The Shinkansen’s active suspension is explicitly a compromise between costs and speed, tilted toward lower cant deficiency because the trains are used on high-superelevation lines. The Talgo’s passive tilt system is much easier to maintain, but also permits a smaller tilt angle.
The Pendolino itself is a fine product, with the tilt removed. Alstom uses it as its standard 250 km/h train, at lower cost than 350 km/h trains. It runs in China as CRH5, and Poland bought a non-tilting Pendolino fleet for its high-speed rail service.
Other medium-speed tilt trains still run, but the maintenance costs are high to the point that future orders are unlikely to include tilt. Germany has a handful of tilt trains included in the Deutschlandtakt, but the market for them is small. Sweden is happy with the X2000, but its next speedup of intercity rail will not involve tilting trains on mostly legacy track as Lindahl’s thesis investigated, but conventional non-tilting high-speed trains on new 320 km/h track to be built at a cost that is low by any global standard but still high for how small and sparsely-populated Sweden is.
In contrast, trainsets with 180 mm cant deficiency are still going strong. JR Central recently increased the maximum speed on the Tokaido Shinkansen from 270 to 285 km/h, and Talgo keeps churning out equipment and exports some of it outside Spain.

And round 456,334,343 of centripetal vs. centrifugal force debate commences in 10, 9, 8,…
Ah, yes.
There’s always a relevant xkcd
I’m a big fan of tilting trains, but I must reluctantly agree with the conclusion of this blog post, tilting trains utilizing active suspension are likely not worth their costs in purchase and maintenance.
However, during my many years of research I’ve become a fan of the Japanese pneumatic suspension tilting system which according to the technical papers and promotional brochures provides meaningful travel time savings at a lower cost in purchase and maintenance of the trainset. Beyond the latest Shinkansen trains, it’s also in widespread use on many EMU and DMU intercity trainsets for the narrow-gauge services. I have notice that new trainsets with the air suspension tilting system or replacing older sets with the active tilting. NHK World’s ‘Japan Railway Journal’ as covered this tilt tech for the Shinkansen and conventional intercity trains.
E353 series
https://en.wikipedia.org/wiki/E353_series
If it were up to me and I had a magic wand, I would have chosen the Japanese air suspension tilt system for both the new Acela and Regional trainsets – including rollingstock for the Hudson Line. The Talgo trainsets for the Cascades allow speeds (under FRA regulations) 10 to 15 mph higher than conventional stock, and for the Hudson Line that would allow a train to cruise at 110-mph for most of Albany-Poughkeepsie and 80-mph through the Hudson narrows – certainly “good enough”.
I’ve been looking at how in Upstate NY a new high-speed line to Buffalo from Hoffmans where the Amtrak Hudson Line merges with the CSX mainline after Schenectady would be a better investment than sinking billions into the freight line for a 90-mph service with eight daily roundtrips. The DEIS had a travel time NYC-Albany of 2:05, and while tilting could knock some time off that, it wouldn’t matter much for the NYC-Capital District market and with electrification you can use a high-speed train like the Avelia Liberty to go 186-mph on the new tracks, which really would knock the travel time down. Dispensing with the tilt, and the Avelia Liberty can do 220-mph, so what ever time saved by tilting in the Hudson Valley over legacy track would really count for much in bringing Utica, Syracuse, Rochester, and Buffalo within a competitive travel time to New York City.
Be nice if Alstom and Siemens would license this pneumatic suspension tilting system from the Japanese. For HS2 I was looking to see if Hitachi was going to include it for the legacy-line high-speed trainsets that would use the WCML to Scotland.
This paper “Development of Next-generation Tilting Train by Hybrid Tilt System” provides a lot of information on the “air springs tilting system” of the Japanese… http://www.railway-research.org/IMG/pdf/552-2.pdf
As you can see it can deliver speeds around curves equivalent to the Talgo, but with high-level platform trainsets, a big plus in the American Northeast and the UK. Example of a BNSF speed sign for the Talgos… http://www.hsrail.org/sites/default/files/images/Talgo_Advantages.pdf
Other references…
Nippon Sharyo Tilting System
https://www.n-sharyo.co.jp/business/tetsudo_e/tilting_system.html
Hitachi: Latest System Technologies for Railway Electric Cars
Click to access r2005_04_102.pdf
JRTR Speed-up Story Part 2: Speeding-up Conventional Lines and Shinkansen
Click to access 51-60web.pdf
Seems like Amtrak is letting the rest of the country’s tail wag the Northeast Corridor’s dog.
https://media.amtrak.com/2021/04/amtrak-announces-siemens-as-preferred-bidder-for-new-equipment/
Is this why JR Hokkaido dropped development of KiHa285 ten years ago, after a railway accident exposing their lack of ability to keep up with the maintenance cost?
I would think so very much, although JR Hokkaido’s biggest financial issue is that they serve the Japanese equivalent of Wisconsin and Upper Michigan, its low population density and is shrinking in population outside Hakodate and Sapporo. Plus from what I have read the Rail Stabilization Fund is being hurt by low-interest rates, which reduces the subsidy for JR Hokkaido. Overall the new intercity trainsets in Japan I know about have the active suspension and air spring tilt system, instead of the semi-active pendular tilt system. The notion that a “simpler design is often the better design” I guess goes for tilting trains too.
In reference to JR Hokkaido, perhaps Tilt Trains are a bit like fast sports cars, their great when your flush with cash, but in hard times you get the sedan.
Hokkaido also barely has any Shinkansen…
Who runs the fast trains thru the Seikan tunnel? JR Hokkaido or someone else?
Well, at least they got nice pumpkins
It is JR Hokkaido from what I read. I think they’re using the Shinkansen to ship out the pumpkins to fill up the empty seats 🙂
… using the Shinkansen to ship out the pumpkins… only after midnight?
They use narrow gauge freight trains pulled the Class EH800 locomotive which shares the Seikan tunnel with Shinkansen trains.
From what I know, they rope off a car on the scheduled service and place the boxes on the seats.
https://asia.nikkei.com/Business/Business-trends/Japan-s-empty-bullet-trains-look-to-fresh-freight-for-revenue
One of those days we’ll have trains that carry fresh tropical fruit to the temperate climate zones like planes currently do…
@Herbert: Flowers used to be a pretty big business, and transported in the baggage car of the top expresses between the mediterranean and the big cities (Paris, in Switzerland, in Germany).
There are also fresh shellfish shipped from the Cornwall to London by express train (or the Night Riviera).
Better than to throw the pumpkins from bridges into chimneys of steam locomotives, as the youth tended to do …
FS has rebuilt some if its high-speed trainsets for “Mercitalia Fast” freight-only services, and the past offers us various US refrigerator lines like the Pacific Fruit Express, which made the California – Chicago run with an average of 98 km/h (or was ist 98 mph?), including crew change stops.
I doubt it could have been 98 mph? Traditional US railroads barely ever even hit 100 mph, typically just express passenger trains making up time after delays. Upgraded passenger trains like the Metroliner of course went faster but they were only passenger trains and only under electricity.
Following the aforementioned incident, JR Hokkaido have also decided to gave up upgrading express trains in its area from optimizing for high speed railway connection, instead choose to do nothing and wait for the high speed rail itself be extended to Sapporo in 2030/2031
The problem was not the expense of maintaining the pendulum tilt mechanisms- it was the deferred maintenance on sections of track on the Hakodate Main Line leading to derailments- there were accusations that management was paying more attention to the profitable real estate and properrty management side of the business than day to day running of a railway. Subsequently to salvage the image of the railway in the eyes of the public, safety was emphasized and speeds were reduced to reduce wear on the tracks- the ltd express route on the Hakodate Main Line formerly had the highest average service speed in the nation. Once speeds were reduced (something like 10km/h down) the aggressive tilt was no longer needed, nor was any higher speed prototype trainsets. Older non-tilting stock was replaced with cheaper to maintain air suspension tilt trainsets (existing pendulum tilt trainsets still operate).
But likely what really slowed the schedule down was the timetable revision to make reliable connections with the shinkansen at Shin Hakodate Hokuto station- trains were scheduled with priority to make those connections (with some schedule padding) rather than getting to Hakodate as quickly as possible as in the previous operational scheme.
clarification re.*highest avg service speed*- for legacy lines (i.e. non Shinkansen).
@Benjamin Turon Its worse than that. The post-bubble demand deficient deflation not lowered interest rates on those funds but also made existing liabilities more expensive due to real interest rates. Plus a poorer economy hampers revenue. Austerity is bad don’t do it.
With JR Hokkaido its not just circumstances bad management during the JNR era screwed them. Southern Hokkaido is anti-LDP so they never completed a Seikan-Tunnel to Sapporo electrification which would have really helped both passenger and freight rail. Compare that with what they did with Niigata which had PM Tanaka giving it absurd amounts of cash (google Hokuhoku line). Alon’s talked about the primate-city problem, in Japan one might talk about primate island, Hokkaido was the one place where the mainland all-for-passenger strategy was a mistake. KiHa285 was trying to make that good on the cheap. And lets not talk about how everybody kinda screwed up Sapporo’s mass transit (by screw-up I mean underperform Central European cities of similar size). That said the everything-for-Sapporo-Tokyo-Shinkansen is probably sound given how busy the air route is.
Aside from tilting trains, JR Kyushu’s recent attempts at guage-changing trains has collapsed which is making the whole Nagasaki Shinkansen kinda pointless since you need to change trains at least once. The video below has a good summary of the politics as to why they didn’t just build a proper new alignment through Saga. Another one for the pile of relying on wizard technology is a bad idea when you have a better but hard conventional means?
@Andrew in Ezo and @Borners, thanks for the information on JR Hokkaido and JR Kushu. Never really thought about why electrification of conventional narrow gauge line doesn’t extend to Sapporo, but now I think of it it doesn’t make sense except for politics. Did notice that the gauge-change trains seem to be going nowhere.
Why don’t they build a mini Shinkansen on the existing line in the gap?
@Matthew Hutton If you haven’t bothered to fully electrify are you going to fully bother laying a standard guage track while you are building a full on Shinkansen to Sapporo? That said they should totally still finish electrifying between Muroran and Hakodate, they gave up capacity, speed and C02 emissions.
@Benjamin Turon one shouldn’t exaggerate the politics. LDP regional politics is not zero sum, they still got the Seikan tunnel after all, its about order of prioritization and thinking in terms of system connectivity. In Tokyo and Osaka co-operation between legacy private rail and the subways provided that. Elsewhere JR-Local transport agency co-operation hasn’t worked so well. Which probably explains why mode share declines sharply after the big two. I suspect Hokkaido’s prefectural government also got burned by the expense of the Sapporo subway (which they totally screwed up, no through running, missed connections, no cut-and-cover despite wide straight streets, rubber wheels, different gauge …eugh).
Also the video I linked to above is a Youtube channel of Japanese rail fan, its got a lot of info that isn’t in English about Japanese rail systems. Takeshi’s very responsive to feedback too and deserves more views!
@Matthew Hutton Mini-Shinkansen involves re-gauging the railway from narrow (3’6″ Cape Gauge) to Standard Gauge, and that would cut the freight line. The other Mini-Shinkansen lines didn’t carry freight, so re-gauging was not disruptive, local service switch to using standard gauge trainsets, Metro-North in Japan… lol 🙂 . They could of course go mixed gauge like the tunnel, but then you still have the issue of the interference between Shinkansen and freight, with local passenger trains added in for good measure. Plus you would have to buy a new fleet of trainsets that can fit in the narrower loading gauge of the Mini-Shinkansen. Overall, just finishing the Shinkansen to Sapporo is the most cost-effective and pragmatic move. But still, they should electrify the existing line, especially to improve the freight service.
@Benjamin Turon
They were planning a new fleet for Nagasaki Shinkansen anyways with the cancelled GCT project. GCT would also be Mini-Shinkansen loading gauge, dual electrification, etc. as well. The main difference from the GCT plan would dual gauge track instead of dual gauge train.
It seems like having a dual gauge Mini-Shinkansen section through Saga would have been a really reasonable idea. Am I missing something else?
@borners
Do you have any more information on what lead to the Sapporo Subway? It has a lot of interesting design decisions that can’t all be blamed on copying what Tokyo does and expecting it to work. Not doing cut and cover was a missed opportunity, but understandable, other stuff like the choice of rubber tire metro is less understandable.
@Sassy Nothing in English I’m afraid. From what little I gather in Japanese you’re definitely right they weren’t overlearning Tokyo’s lessons unfortunately. They were in gadgetbahn mode learning the wrong lessons from Paris about rubber tires. And with the central rail they had a monorail fetish (still haven’t automated yet the cowards) And then even more stupidly changing the electrics from 3rd rail to catenary on the later 2 lines so their rolling stock can’t be shared. Their maintenance costs must be nasty and its the most financially troubled of Japan’s subway system. I also misunderstood, they did actually do some cut-and-cover, so the mysterious and yet unexplained high Japanese cost disease emerges again. Those rubber tires pushed them to put almost everything underground and those bits outside (e.g. southern end of the Namboku line) are covered, presumably because they were worried about snow. There are are placement issues too especially in the SE their station zones overlap and the density isn’t enough to make the Toho line (which is too short on both ends).
These problems aren’t unique, there is Hiroshima’s astram line which is also central-rail rubber non-automated, which didn’t have its Sanyo main line connecting station till 2015!
Interesting that moving to Germany, a country famously plagued with all kinds of issues in all of its tilting trains has influenced your opinion against tilting trains. They remain, however, quite in use in Switzerland and there are perennial calls to use them on the curvy Stuttgart Zürich Gäubahn…
The Zürich-Stuttgart services did profit a lot from the tilting trains. They allowed to connect the main nodes in Zürich and Stuttgart. This is currently not possible.
Years ago, I had customers in Nürnberg and in München. Because the ICE-T had electrictiy on board (and I was travelling with an Eurodomino ticket (yeah, that long ago)), that was my choice.
One occasion I remember pretty well. Everything was OK from Zürich to Singen. After the change of direction, the tilting system had a problem, and they deactivated it. Delay in Rottweil: some 15 minutes. Apparently, they got the tilting system back online, and the driver was up to catch up on the delay. The 5-car ICE-T allowed to keep the slow section short, and the driver ran the train just on the line. So, imagine a slight rollercoaster feeling… Arrival delay: 3 minutes, and all connections could be made…
One big issue for German tilting trains was the obsession with privatization and that long-distance traffic ought to show a surplus, which lead to the large-scale dismantling of the Interregio network, with the biggest effect on the marginal lines.
For example, plans for the ICE-T (class 411/415) and ICE-TD (class 605) included a common section Frankfurt – Erfurt – Weimar, where the train were to split and the ICE-T continuing via Leipzig to Dresden and the ICE-TD via Gößnitz and Chemnitz to Dresden. The latter one lost its IC/IR traffic, to be replaced by state-subsidised REs with class 612.
Then the ICE-TDs were deployed on Nuremberg – Chemnitz – Dresden, where they were not only plagued by technical issues, but also by a lack of ridership, again leading to replacement by state-subsidised REs. What could have been …
What had been definitely was Leipzig – Chemnitz, where class 612 DMUs took 59min without tilting and 53min with tilting. 30% faster around curves, 10% faster on the whole line (obviously depends on total curvyness) doesn’t look that good, unless you need it to gain the most important, last minutes between two nodes in an integrated timetable.
It sounds like the Japanese system is pretty good. It’s just a shame we pretend Asia hasn’t got any good ideas.
I remember a tweet from LNER boasting they turned a train round in 20 minutes due to maintenance – well the Shinkansen turn round in 7 minutes every day.
As far as I understand the Swedish tilting trains have been fairly economical, as well as successful. Nearly all the profits from the for-profit public railway company come from the 2-3 high-speed lines using the tilting trains, and I have never heard complaints about particularly high maintenance costs for the trains. I think the bad reputation is really only for a single model of trains (Pendolinos), I don’t think there is any fundamental technological issue here.
On the other hand, I have personally always found them pretty uncomfortable (in particular when facing backward).
I am pretty Sweden will not build a true high-speed rail system within the next decades also, so the tilting trains will be around for a long time (and will in any case be around for sections such as Stockholm-Oslo).
I think it is neither environmental nor economical to put down new high-speed rail tracks all over the world, so I think very many countries (in particular in places like the former Soviet Union, and legacy tracks in the US), could make great use of tilting trains.
EVERY tilting train series DB has ever had in service has a lengthy section on their Wikipedia page about the problems they had with them.
Granted, some of that happened under Mehdorn – but not all of it.
https://en.wikipedia.org/wiki/DBAG_Class_612?wprov=sfla1 this one even is a twofer (as always the English version is less detailed than the German one)
I didn’t talk about it in the post because that’s not why Germany (and others) is letting go of this tech, but in the US tilting trains have one additional problem: their use case is mixed-traffic lines, where speed is limited by the presence of slow freight trains. On the only non-Northeast Corridor Amtrak line with tilting trains (until recently), the Cascades, the maximum cant deficiency was set below the equipment’s capability simply so that the freight owner of the line wouldn’t need to keep up with faster passenger trains.
Mixing speeds is bad for capacity. That’s why four tracks have more than double the capacity of two…
Just awful of them not-spending money no one wanted to reimburse them for. Hauling raw materials in and finished products out. Or vice versa. That gives people jobs so they can buy train tickets. Awful.
I suppose people could just stop buying stuff. That doesn’t work out very well once the pantry is empty. Grocery shopping in Idaho? I suppose the ones in Southern Oregon could go to California. But since they don’t have jobs, the walk would long. They could raid the containers piling up at the port but that wouldn’t last very long either. Nowadays the ships have satelite telephones and they would get redirected to ports that are open. Hmmm.
Or they could just time the freight trains so as not to interfere with passenger trains.
The complaint is about the condition of the track not the scheduling.
Seems like they are going with non-tilt for the new cars. I haven’t been able to find much detail. …. if they were tilting they would have put that in the press release.
https://media.amtrak.com/2021/04/amtrak-announces-siemens-as-preferred-bidder-for-new-equipment/
Even if maintenance costs are higher, could tilting trains not be an economical solution for higher speeds if the alternative is building far more expensive new infrastructure (e.g. a tunnelled bypass)? It seems to me that relative maintenance costs are fairly trivial compared to building new lines or even revamping existing ones.
That said, most tilting train projects I’m aware of have involved refurbishing lines in tandem with rolling stock purchase (e.g. NEC, WCML, Sweden, Queensland’s tilt train). It could still work out cheaper given the speeds attained than the works needed to achieve comparable speeds. But probably the take-away is if your line is already set up for tilting trains you might as well continue to use them; if not, then don’t worry about it and just use high-performing normal stock.
> could tilting trains not be an economical solution for higher speeds if the alternative is building far more expensive new infrastructure (e.g. a tunnelled bypass)?
That’s presumably why Japan uses them. Shinkansen trains run much faster than what was intended when the tracks were built, the Tokaido Shinkansen was built when 210km/h was considered very fast for commercial service after all.
Building a new track with more tunnels is an extremely expensive venture, and not worth it for the ~30km/h they get from running tilting trains at 285km/h around 255km/h curves. They are building something entirely new with the Chuo Shinkansen, but that’s a maglev slated for 500km/h service with room to get up to 600km/h+, because it’s supposed to be the flagship transit service between Tokyo and Osaka until well into the 2100’s at least.
Actually the 210 km/h speed limit was imposed by the World Bank and the Japanese planners always aimed for higher speeds than that.
Just goes to show that Washington consensus types were always filled to the brink with excrement
@Sassy The Japanese have developed a tilting system –pneumatic air springs — that is a good compromise between increasing speed and comfort, while keeping maintenance cost low. Be nice to see other manufactures and rail operators try this system out, it would give Talgo like speed increases around curves.
Is it possible to use Talgo-style passive tilting on trains that have bogies?
Most of those type of trains tried out are low-slung like the Talgo, most were Talgo-derivatives, like the CN Turbotrain.
I wonder how much of the problems are the things that another round of engineering investment could solve, and which are inherent. I’m just old enough to remember poor adults calling all their friends to show off their car turning 100,000 miles – they had to add oil before they left, pulled away in a cloud of smoke, and when they came back had to add more oil (I was too young to be invited on that special trip). Now most cars last far beyond that with minimum maintenance because of of all the engineering effort. Car manufactures have put a lot of effort into reliability to get there.
I don’t think the question is entirely answerable. I’m also not sure if it would be worth the engineering costs. Still the question is worth keeping open just in case.
In the case of the Automotive industry increasing reliability despite increasing complexity, scale played a huge role in amortizing the costs of such complexities. The rolling stock industry does not have the same scale and tilting trains as a component of global fleet is decreasing making the case for any future investment even less feasible.
The Automotive industry also hit a wall with reliability and even started regressing especially in diesel engines as they added more complex Variable valve timing, Variable geometry turbos, Direct injection, Exhaust Gas Recirculation, and Particulate filters. Newer turbo gasoline engines also have reduced reliability as they adopted the complex technologies from their diesel counterparts. This is much pronounced in the increased maintenance of Trucks with modern diesel engines with modern emission control tech.
Trains have to (and do) last tens and hundreds of millions of kilometers…
So whatever you can do to get to ten thousand or a hundred thousand kilometers has already been done and then some
Is there a reason why no one has figured out how to make a high-platform compatible passive tilt train? I always thought the low-slung nature of Talgos was a style/brand thing.
UK Pendolinos (Class 390) are used on the significantly twistier West Coast Main Line – basically increasing top speeds from 110 to 125mph. Any onboard footage clearly shows the 2 separate speed limits for tilting/non tilting trains!
The brand new Azumas (Class 800/801) on the East Coast Main Line have no tilting capability – as the ECML has always been much flatter, straighter and less curvy, and therefore 125 is “easier” to achieve.
Obviously the UK will solve the ECML/WCML capacity issues as long distance high speed services move to HS2. Will be interesting if tilting trains are purchased for WCML use in the future at Pendolino end of life (probably 2030/40), given the probable focus on local, regional and freight services.
Had the Brits built a proper high speed line in the seventies, they’d have saved loads of money…
Indeed – Thatcher was much happier to starve British Rail of investment instead.
Thatcher was a symptom not a cause. BR had destroyed its reputation pretty well by that point as had most state owned sector. And by dismantling the cartopia New Town construction system Bevan and the Tories had created she unwittingly got rid of the single most important anti-rail policy in British history. The revival of city centres especially London starts from 1983 not 1986 with the Big Bang Financial reforms. With that the railway revival starts.
Sure it would have been great is BR had SNCF or heck even JNR (shudder), it wasn’t. They couldn’t even do electrification properly. It wasn’t all their fault, they had the crappiest Industrial policy state, crappiest unions and crappiest urban planning in Europe. Blaming Thatcher is the easy way out.
Let’s blame Beeching, then
Beeching too was a symptom. They didn’t see why Southern and Metropolitan railways had been so successful before the war. Integrate real estate with rail and electrify everything you can. And you didn’t necessary need-Japan style rail sprawl, you could go with Seoul greenbelt jumping….actually London area does do that. But the dual curses of Postwar Britain, naff Socialism and hypocritical Conservatives (whether wet or Thatcherite).
Beeching was the instrument. The main responsible for that senseless slashing the network was the transportation minister at the time. Beeching more or less simply provided a report his “boss” wanted. I don’t know how much the goal of the study affected Beechings methodology (which sucked big time… any second semester student in economics or industrial engineering would have done better…)
Its not even the transport minister sketchy though he was. The reality is that the entire British body politic right-to-left decided to declare war on British urbanism which was effectively to declare war on trains! Add in UK management and labour problems. Aneurin Bevan (Mr Planning Act) and Herbert Morrison (Mr Greebelt) did much more damage and still do since the Conservatives kept and expanded their anti-city and thus anti-train system.
We need a political system that overrepresents cities – we have had plenty of experience with the disaster that is overrepresenting rural areas…
@Herbert: “We need a political system that overrepresents cities ”
Actually, equal representation would be a good start ….
@Herbert that’s not been a problem till basically 2019 since 1960-2015 gave Labour an advantage since declining industrial regions rural/town/cities were overrepresented and Tory leaning exburbs underrepresented. London, Bristol and Birmingham had large shares of marginals too. As Michael says its that FTPT’s stark underrepresentation of non-plurality winner voters that’s the core problem. And because social liberals/white collar precariat/visible minorities cluster in cities Tories have a structural advantage.
And in British politics improved rail has a complicated relationship to parties. The most opposed are rural and ex-industrial constituencies, the most pro-urban and then commuting exurbanites/suburbanites. SE of England has lots of latter and everywhere else lots of the former. That’s why London has Crossrail and Manchester has tram-trains.
And Michael before you go on a Philippic about how the British are a Feudal society. The reality is that the Left in Britain decided that the English should not exist except as the British because they didn’t want to admit that there was never a single British working class and Socialism didn’t solve everything. There is no official English Labour party even today. Thus Thatcher, thus Brexit, thus Boris and thus FTPT survives. Pointedly Labour is only strong in Wales where the Tories have kindly become Bloc Anglois so they can be the Welsh SDLP/SNP.
That has consequences, as long as the British set-up sabotages (it cannot stop/suppress) then the English sub-conscious is directed against British institutions, outsiders and Celts etc. That includes the Civil Service and multi-cultural cities and without improving those improving rail is impossible.
@borners
Rafael Behr in today’s Grauniad:
Class has had, and continues to have, a huge impact on the UK.
FWIW, I have never figured out quite how the UK went so off the rails (sic), and exactly when. Though my overarching theory is that they were the worse for never having a proper revolution. The dreadful post-war period is something I only vaguely understand. Is it all down to the horrible economic aftermath of the war that left them bankrupt and merely scraping by? It was austerity economics and everything in this period was shoddy and inadequate, not just starving the railways but poorly-built motorways (“concrete cancer”) , or underbuilt motorways (I arrived in the UK just after the M25 London orbital opened–after the usual decades of prevarication–and it instantly was congested because they didn’t built it big enough and have been widening it more or less ever since, and under permanent repair and disruption), buildings like social-housing that were so poorly built it either fell down by itself or performed so poorly as habitation it is all being demolished, lack of planning for airports, London Underground, ageing water and sewerage infrastructure.
As I say, I can’t tell if this austerity mindset was simple consequence of the war and loss of empire or if it was largely self-inflicted, not strictly necessary. Why did France have its Trente Glorieuse, building excellent infrastructure and rejuvenating its cities and towns, rebuilding its railways etc. Was it simply that they weren’t burdened with that war depletion and debt?
As to Thatcher, she was both cause and effect. Everything else having failed, her extreme ideology was given a shot. It wasn’t Conservativism but pure Hayekian neoliberalism with vicious austerianism (that didn’t work, she didn’t manage to shrink govt expenditure at all, and to top it all wasted the North Sea oil windfall–compare to what Norway did). Before her, British Rail may have been in benign neglect and decline but Thatcher was implacably hostile, closing down the tilt-train R&D (the IP was sold off cheaply to the Italians who used it to create Pendolino), and the 1987 Channel Tunnel Act which outlawed government funding for the Channel Tunnel, only reversed after she had gone with the Channel Tunnel Rail Link Act 1996 (to build HS1). Then of course there is the total debacle of privatising BR (planned under the Cons but implemented by Blair fulfilling Thatcher’s claim that her greatest accomplishment was …. Tony Blair). I don’t believe Thatcher would have supported Brexit (she wasn’t that kind of stupid) but she had a very hostile public stance to the EU that communicated this toxic culture which led to where they are today.
OTOH, maybe this view is wrong. Maybe only our perspective has changed in the post-war period and it is just SOP of the British Empire for the past 3 centuries. After all the top few percent are richer than ever and will remain so despite Brexit, indeed in all likelihood the rich will get even richer while the rest get seriously poorer. The only thing that would change this is a real revolution.
Britain and England mostly kept up till 1945. You don’t need a revolution when you have Parliamentary sovereignty. We had the greatest revolution of them all: the Industrial Revolution. A big part of Britain and England’s problems stem from being the first industrial country ever, more than from being an undefeated failed Empire.
You didn’t see what I was getting at. Any discussion of modern British politics needs to understand that you need to talk the component nationalities especially the most “ignored” one, which is England. And Britain “goes off the rails” when they try to make the English stop being English during the mid-20th century….yes it is that stupid. Any analysis of Johnson’s power and Brexit that doesn’t use the word England is fundamentally wrong. Any explanation for the failures of the British left needs to understand their dislike of majorities that don’t fit their preconceptions.
This is critical to understanding railway failure in Britain, English identity always given to rural romantism was exiled to it. The Nimby organization par excellence is the “Campaign to Protect Rural England”. You can see this nomenclature there are Welsh and Scottish railway franchises, “National Express” but no English ones. Johnson talks about NI tunnels and not the Manchester Piccadilly-Victoria because the latter is about England not Britain. His power structure requires that English identity remains twisted and deformed so that he and his can channel its discontents into power. Any successful revolution in the UK will be an English nationalist one that dissolves the Unions. The monarchy, Westminister and yes Eton will survive because they are not the real obstacles to change whether your electorate/populace really wants to change itself.
You want to keep your Australian anti-English/British fantasy of Poms, oiks and Toffs (my family is half-Australian and I speak with a deep London posh accent I know all about this) because the truth of multi-national politics, of the vast middle class of exburban Southern England, the nihilistic politics of ex-industrial Outer England etc are more disturbing. Performative Aussie anti-Englishness always shows the weakness of Australian nationality compared to CDN and NZ. But I come from the country that does not know its own name so what do I know.
@borners
You are right that I didn’t see what you were getting at. Still don’t. At least I find it a most peculiar view and not supported by any evidence, indeed contrary to all the evidence. I agree that the “monarchy, Westminister and yes Eton will survive “ but that is precisely the problem, as if Boris is not the nadir of inherited privilege overcoming vastly more important factors like competence etc. Of course when I mean revolution, I precisely mean overturning (destroying) those things.
As to the failures of the Left, sure they have to carry their share of blame–but really most of the damage is from the Right–not least their utterly confused position(s) on Brexit (and being besotted with monarchs, and those idiot northerners who voted against their own best interests by anointing the clown Boris). But take one of the more important creations of the Left, the NHS which is performing quite well during the pandemic–and that success has absolutely nothing to do with the Tories or Boris who have tried to destroy the NHS over the decades and specifically have starved it of funds since they came to power in 2010, as well as burdening it with debt. Compare to the debacle of the “test and trace” operation that was outsourced to private consultancies. It is laudable that the NHS does as well as it can despite one third less funding than its peers; ie. 8% GDP versus France, Germany, Switzerland at about 12% GDP.
The reason why I as an Australian–apart from actually living thru Thatcherism in situ–take a special interest is the lamentable way in which English mores, including all the weaknesses of Westminster and the monarchy, negatively influence my country still. Hoping with the near-term demise of QEII we might get some change (here, not there, you lucky sods will have Charles for another 30 years).
Interestingly, the one country which does rely on tilting trains as a premium product is not mentioned: Switzerland.
In fact, the leading bogie developer (SIG) did develop several systems to allow for higher speeds in curves. Whereas the (original) FIAT system uses hydraulics (as in the Italian-built Pendolini), SIG used electromechanical actuators (you may have heard SIG in the context of weaponry, and one of the military system they developed was a stabilizer for the cannon in tanks) … pretty much same tasks. The SIG system is in use in the Swiss ICN (Class 500), and the British Pendolini used on the WCML.
SBB needs tilting trains to keep certain services within the 57 minutes maximum between main nodes, and the ICN do a very good job.
SBB also has Alstom (FIAT)-built Pendolini (ETR 610/Class 503 (Astoro)) for international services. The newly electrified service between Zürich and München is actually relying on tilting trains, in order to remain in Takt (currently 4 hours; as soon as system switching in motion is reliably working, 3.5 hours. In particular around München, and also between Zürich and St.Gallen, keeping the Takt is very demanding … allowing the tilting trains to show off…
Another SIG development is the tilt compensator (Neigungskompensator, NeiKo). This system’s intention is to compensate the centrifugal effects on the secondary suspension. It tries to keep the floor of the vehicle parallel to the plane of the tracks. This allows to run at higher speeds without violating the loading gauge. This system is electromechanical, with some hydraulic dampers, therefore somewhat complex. It is implemented in the Class 502 bi-level EMUs (Bombardier Twindexx Swiss Express).
These trains were severely affected by all kind of technical and organisatorical issues, leading to a 5 year delay. The tilt compensation mechanism was one of the issues, because it lead to rather bad jerking over switches. In the meantime, this got sorted out, and the trains run kind of stable. Because of their very high power to weight ratio and that system, they also can hold the schedules set for tilting trains. They are slower in curves, but can accelerate faster afterwards.
Tilting trains can be a viable component in the organisation beats electronics beats concrete formula!
Do the Swiss simply take the hit of additional maintenance requirements or do they have some magic others have no access to?
The higher maintenance cost is accepted, because any other mean to achieve the needed service level would cost more by magnitudes. Also keep in mind that the number of trains is relatively high, justifying good maintenance facilities and staff (44 ICN plus 26 ETR 610/Class 503) plus 62 (if they counted in the three penalty sets built for free by Bombardier) bi-level Class 502.
Question: how long would it take for speedups top existing lines that allow the node system to work to be cheaper than running tilting trains?
So extra cost p.a. In maintenance, rolling stock acquisition etc. vs one time cost of strategic bypasses, tunnels or whatever it takes..
You may expect to spend several billion francs for new lines; just local upgrades won’t do it in this case. And among that a new (straight) line from St. Gallen down to the Bodensee may not even possible because of the steep grades to be expected. The current line has a maximum grade of 2.8% (in the olden times, before the Re460, the longest (if I remember correctly, 15 EW IV) train needed a Re6/6 from Rorschach to Zürich).
Even to upgrade the line with the most likely chances (Jurafuss), a couple of Billions Francs would be needed.
> The formula on standard-gauge track is that 150 mm of cant equal 1 m/s^2 of lateral acceleration.
RIP trig. Oh those engineers and their linear approximations.
“The Pendolino itself is a fine product, with the tilt removed.” Wrong. CRH5, the tilt-removed version of the Pendolino, requires the most intensive maintenance among all EMUs currently operating in China. And for this reason , domestic Chinese railcar manufacturers have developed their indigenous versions of EMUs from almost every single technology platform they’ve introduced -including Velaro (CRH380B, CRH380C), Zefiro (CRH380D), and Shinkansen (CRH380A) – with Pendolino being the only exception.
Huh, interesting. Have domestic manufacturers developed their own versions of other 250 km/h trains?
@Alon Levy
It seems like all the original import+tech transfer CRH trains were 250km/h, even if the train they were based on could go faster. e.g., E2 is 275km/h but CRH2A/B were 250km/h.
As explained by @Sassy, yes. And I think the Pendolino platform itself, rather that general tiliting technology, should be blamed for the high maintenance costs you’ve mentioned above. Pendolino are among the few modern EMU trains that make use of body-mounted motors (rather that bogie-mounted ones) and lorry-type transmission axles:
This design not only makes the transmission system fragile, but also adds to the difficulty of regular inspection and maintenance (since the axles need to be detached from motors before maintenance work could take place.). Such a complicated transmission system is used only to free up some spaces around bogies where the active tilting mechanism can be installed. Most other tilting trains, however, does not follow this. Even the new Acela, derived from the Pendolino platform, will not use body-mounted motors, as it is a push-pull train with non-tilting power cars, having no conflict between motors and the tilting mechanism.
The pic you linked to doesn’t work for some reason.
@hx Fascinating. Sounds a bit like the difference between 19th Century British and American steam locomotives — the inside the frame vs. outside the frame mounting of the cylinders. When reading about Japanese railway development, the American locomotives were easier to maintain and as quality improved you see the US coming to dominate imports of locomotives into Japan by 1900.
I think the Avelia Liberty is more a TGV-derived trainset with a tilt option (300kph/186mph w/ tilt, 350kph/220 mph non-tilt) then being a outgrowth of the Pendolino.
Avelia Liberty: Innovation and proven design at very high-speed
https://www.alstom.com/our-solutions/rolling-stock/avelia-liberty-innovation-and-proven-design-very-high-speed
Wow, that drive shaft to axle setup looks like a hot mess. Thanks for the image @hx, this is the first rail car bogie I have seen with this setup. I went down the rabbit hole looking at several CRH bogies and it looks like CRRC and its various subsidiaries have settle on the CRH2 derived bogie design for the Fuxing family of rolling stock. Interesting to see how the Fuxing bogie has evolved from the E2 compared to the N700s bogie while some similarities remain. This contrasts with the Siemens Velaro based CRH3 bogies which look totally different.
My understanding is that, in the Fuxing family, CR400AF is mainly derived from CRH2, but CR400BF is mainly derived from Siemens trains?
That kind of drive is not uncommon with smaller, entry-level DMUs with an automatic mechanical gearbox.
Main reasons for such a setup is to reduce unsprung masses, and there is simply not enough space for a motor and gearbox, particularly because the brake requirements are higher.
Given the dead end on tilt and the possibility of $ for the northeast corridor, how would you modify this recommendation of almost a decade ago? https://pedestrianobservations.com/2012/07/10/northeast-corridor-hsr-90-cheaper/
Use active suspension trains, modifying FRA regulations in the process to permit N700s to run on US tracks.
But far more important than any of this is to fix slow zones. Amtrak can save something like a minute on each side of Penn Station just by fixing the interlocking, which at normal European turnout cost is low 8 figures. South Station is a 2-minute slowdown, even cheaper. Etc. The zero-concrete NY-New Haven trip time is around an hour. The concrete I’m proposing on top of it is around $3-4 billion to get it down to 40 minutes and simultaneously increase capacity somewhat.
Modifying the interlocking around Penn Station is a bad idea. Low-speed turnounts are used at these interlockings to make the interlockings themselves short as possible. Also electro-pneumatic switches are used at these interlockings to reduce the overall signal clear time (an electro-pneumatic switch takes less than half a second to move from normal to reverse, while an ordinary electro-hydraulic switch takes about five seconds ), so as to keep as many (up to 25 tph) trains running into Penn station as possible. These switches are generally found at marshalling yards, and are incompatible with moveable-point frogs. Nothing easy to improve here, since what you have is a terminal built in the steam era with huge amounts of station tracks and few connecting railway lines.
For the umpteenth time they just just did a lot of work on either side of Penn Station.
The turnouts are still secant, I believe, and the interlocking imposes a speed limit that isn’t required by right-of-way geometry.
Where did you find detailed drawings? The link I had that said “faster” went dead a long time ago.